Autonomous Systems (AS), which unmanned swarm systems are part of, will make a significant and revolutionary social, economic, education and research impact immediately. Use of swarm technologies and techniques has the potential to represent more than an evolution for the military doctrine and for the implementation of military missions: they could extend the reach and access of operations, reduce risk to warfighters, provide increased capability across the battlespace. In the longer term, swarm technologies can significantly reduce the cost of acquisition and operations of defence systems while minimizing human risk. EuroSWARM has the ambitious goal to become the benchmark in the unmanned heterogeneous swarm systems for defence applications. The EuroSWARM project objectives are:
The main output of the project will result in a modular, scalable and flexible swarm architecture which, in combination with a low-cost demonstration based on COTS devices, will represent the first step for the progressive uptake of unmanned swarm technology and applications in the defence sector. The EuroSWARM autonomous swarm system of heterogeneous sensor, can become a pilot for large scale implementation of such technology for critical European and Global challenges such as border control, surveillance-security, and with a clear dual-use potential.
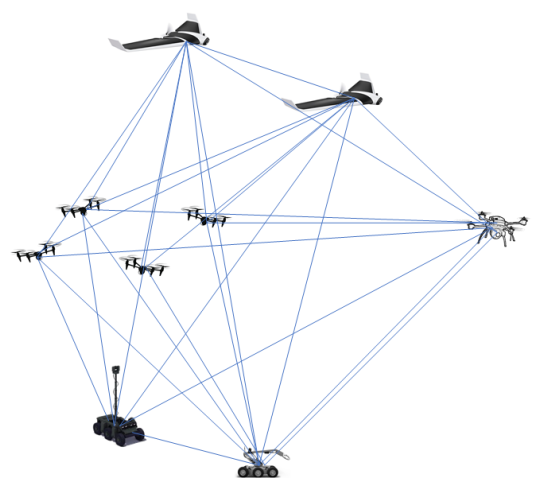
Swarm based autonomous systems can be complex and most systems are ‘customized’ for specific scenarios. In EuroSWARM a modular, flexible and robust architecture is proposed using COTS sensors, innovative GNC algorithms along with a low cost practical demonstration with miniature unmanned aerial and ground vehicles for various task or mission scenarios.
However, other task scenarios, such as potential target proposals and combat search and rescue, will be also considered in developing the enabling technologies. One of the main considerations in the development will be that the proposed technologies should be able to be naturally evolved and easily extended to other task scenarios.
Systems to be considered in the unmanned swarm system consist of two main types: static/unattended sensor network and mobile sensor platforms.
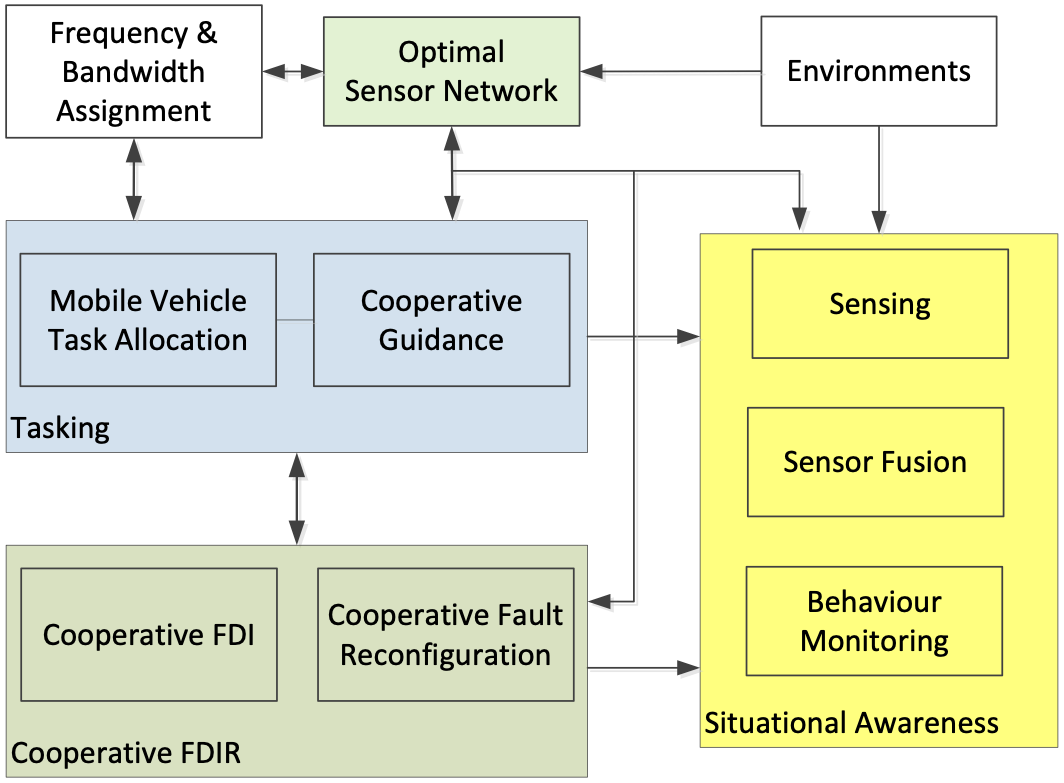
The key enabling technologies identified to realize the concept of the proposed research project are:
These technologies are closely related and an overview of their inter-relation is illustrated in Figure 1. In this project, all these enabling technologies will be developed sharing a common objective, which is maximizing the situational awareness information.
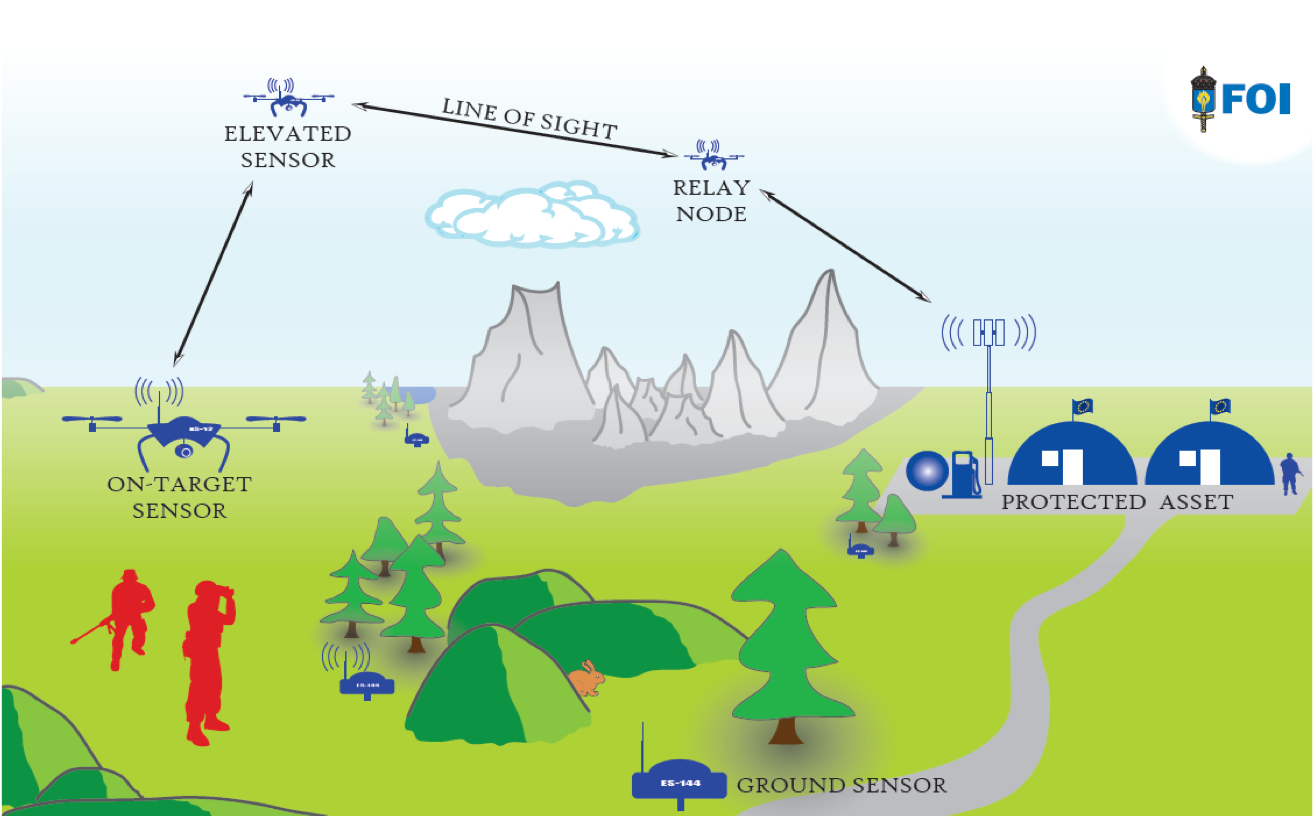
A mission scenario with a very strong interest by military and security/law enforcement agencies is the case in which a specific area of high interest requires persistent monitoring/surveillance. It is assumed that the scenario takes place at the battlefield in conflict with a well-armed and competent opponent. At the moment, the battle is not open but the situation is tense, skirmishes occur frequently, and the risk for sabotage is considerable. Conflict escalation must be avoided, at the same time as own troupes and assets need to be effectively protected. A high value asset (HVA) is considered in this mission scenario as a strategically important camp with fuel deposits and stashes of ammunition and other military supplies. A company is allocated for camp protection and daily maintenance. The camp is located in rough and partly hilly terrain, but it is assumed that the existence and importance of the HVA is known to enemy formations in the region. Guards relieve each other in the task of surveying the camp perimeter for intrusions and to early identify sabotage attempts and enemy intelligence missions.
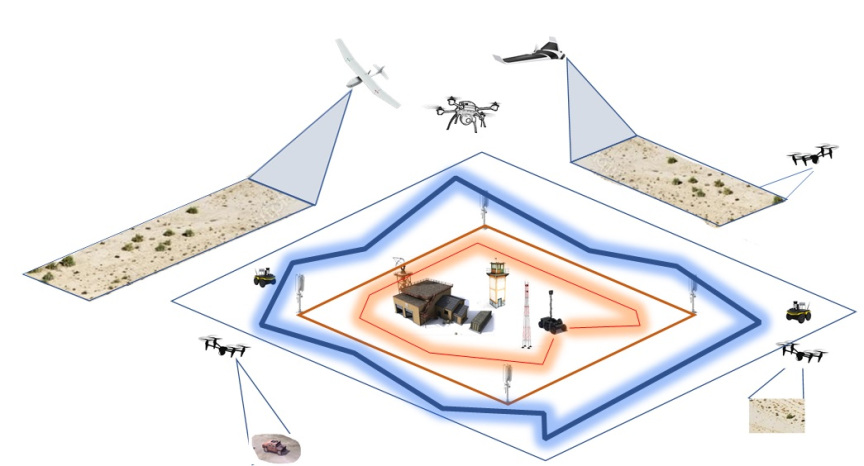
The guards use a sophisticated sensor system to support the perimeter surveillance. As the terrain limits the visibility in the protected area, centralized sensors are however ineffective. Instead the guards use ground sensors distributed in a large area around the camp that facilitates early indications on enemy reconnaissance or approaching formations. The ground sensors are sensitive for the presence of humans, vehicles and animals and give prompt alarms if potential targets are in the vicinity. The ground sensors have limited capability to assess the nature and severity of the threats, but are on the other hand robust and persistent and therefore they enable large area coverage for an attractive price of purchase and effort of maintenance. To support alarm verification, the network of ground sensors is completed with drones that operate autonomously in the sensor system. The drones are only activated for special tasks and missions. For instance, on a ground sensor alarm, the drones do a verification that may give the guard high fidelity video and other sensor data from the target or target area in real time. The drones are autonomous and can collaborate in pair, group or swarm to meet high demands on service quality and persistence toward hostile means of deception and attacks.